Подводное электрическое вырезывание ROV (VVL-XFQG-30A), нержавеющая сталь, режа веревочки, алюминиевую трубу, etc.
| Высокий свет: |
Подводное электрическое вырезывание ROV, Подводное ROV, резать веревочки |
Подводное электрическое вырезывание ROV (VVL-XFQG-30A)
1. Изображение продукта

2. Преимущество продукта
* рука манипулятора вырезывания интеграции с вращением 360 градусов в горизонте пока вращение 220 градусов в вертикали
* режущ ряд диаметра от 30-100mm, смогите специально сделать диаметр вырезывания 150mm, смогите достигнуть более большой задачи с небольшим телом
* смогите достигнуть резать задачу 100-300m под водой
* манипулятор вырезывания интеграции, может держать плотно, отрезанный стабилизированно, может отрезать стальную веревочку, рыболовную сеть, трубу стали и веревочку переплетенные на пропеллере очень хорошо (сравнить с манипулятором 2, одно для удержания, другое для резать, наш дизайн избежит вставленного диска пока 2 оружия нескоординированного хорошо)
* 4 двигателя нажимают робот к направлению 4 стабилизированно
* магнитный соединяя мотор, скорость controllable
* легкая деятельность, стабилизированная функция
3. Зона применения
* подводные обзор и осмотр в океане и реке
* осмотр сосуда
* небольшой размер использован для резать стальную веревочку, рыболовную сеть и веревочку переплетенные на пропеллере
* большой размер использован для резать стальную трубу, стальную веревочку и другие объекты металла с более большим диаметром
* главным образом для подводных спасителей, большого сосуда, подводного инженерства etc
4. Технические данные и главные компоненты
| Глубина погружения |
100-300m |
| Скорость |
0-2m/s |
| Размер тела |
980mmx600mmx700mm, вес приблизительные 60kg (для машины с dia 30mm режа) |
| Материал тела |
Нержавеющая сталь |
| Камера |
4*700 линия камера CCD (камера 1080P HD опционная) |
| Освещение |
Света 4*LED, следовать каждой камерой, лампой галоида 2*75W |
| Двигатель |
2*400W двигатель, робот контроля, который нужно двинуть вперед, отсталый, правый и левый |
| 2*400W двигатель, робот контроля, который нужно двинуть вперед, назад, вверх и вни |
| Компасы |
Компас Outwater и подводный компас |
| Кабель |
| Кабельная жила |
Бронированный пуповинный кабель, (волоконнооптические опционные) |
| Длина |
100-300m |
| Поплавок |
0 в пресноводном |
| Разрывное усилие |
100kg |
| Крен кабеля |
Крен кабеля, особенное используемое для подводного;
Или ручная наматывая аппаратура |
| Наружное moudle управлением воды (SCU) |
| Программное обеспечение |
Программное обеспечение VVLAI |
| Ввод напряжения |
220VAC |
| Размер |
520mm X240mm x 450mm |
| Дисплей |
19 дюймов LCD выделил дисплей, электронный интерфейс, дисплей 4 изображений от различных направлений, 500g DVR |
| Консоль |
Удар-сопротивление и водоустойчивая консоль |
5. Главные компоненты
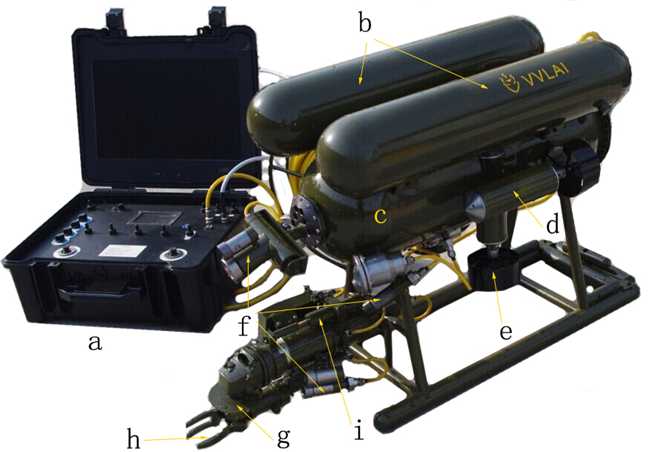
| a. Консоль, контролировать робот к движению, камеру и отрезок подводные |
| b. Трубка поплавка |
| c. Основной корпус |
| d. Двигатели для левого и правого |
| e. Двигатели для вверх и вни |
| f. Камера со светом, каждая камера с прикрепленным светом |
| g. Лезвие вырезывания (диск), меняемые для различной режа толщины, режущ форму и режущ задачи |
| h. Рука манипулятора, для удержания будучи cutted объекта |
| i. Толкатель лезвия (диска), полное расстояние 60mm маршрута |


, нержавеющая сталь, режа веревочки, алюминиевую трубу, etc. поставщик")